
ABB机器人***维修_3HAC031683-001型号
想要了解到更多关于关于该产品的详细信息?可以拨打我们的电话哟
网上看到我们信息的客户。我们均可给予一定优惠哦。名额有限呢
广州市长科自动化设备有限公司,
***的机器人一站式采购商,
我司提供的机器人价格美丽,如果您发现比我司价格更低的公司,
我司可给您限度的优惠,欢迎拨打我们的电话,
了解长科自动化设备的一站式采购服务!完善的***,
让您全程无忧!
广州市长科自动化设备有限公司是一家
***从事机器人销售、改造、备件、维保、培训等***
技术服务型企业.主要涉及品牌有ABB、KUKA、安川、FANUC、
Kawasaki川崎、Panasonic松下、COMAU柯马、STAUBCI史陶、
比尔等及机器人,长科主力于打造******机器人4S店
为理念服务型企业
从机器人选型、安装、调试、改造与无忧***
和维保为客户提供全方面服务,实现工业机器人一-站式服务商。
现货供应,
电话135-2406-4208
电话18520345842
邮箱961551757@***.com
ABB机器人CC-LINK总线通讯 3HNE00421-001 DSQC378A.B
ABB机器人DSQC697通讯板 3HAC037084-001
ABB机器人IO卡 DSQC676 3HAC031612-001
ABB机器人伺服卡HVC-02 3HNA011999-001
ABB机器人IO模块 DSQC652 3HAC025917-001 00
ABB机器人IO卡 DSQC676 3HAC031612-001
abb机器人 IRB1400
ABB机器人板卡 DSQC612 3HAC15639-1
ABB机器人***用油 Mobil美孚
ABB机器人***用油3HAC032140-004 机器人特种润滑油协同油脂TMO150 KYODO
ABB机器人电机3HNP 03854-1
ABB机器人输送链跟踪板模块 DSQC377B 3HNE01586-1
ABB机器人总线适配器 DSQC667 3HAC026840-001
ABB机器人计算机板 DSQC540 3HAC14279-1
ABB机器人电机3HNP 04387-1
ABB机器人电源模块 DSQC661 3HAC026253-001
ABB机器人电容 3HAC025562-001
ABB机器人总线适配器 DSQC667 3HAC026840-001
ABB机器人管线包 3HNA016041-001
ABB机器人电源分配板DSQC662 3HAC026254-001
ABB机器人配件 DSQC604 3HAC12928-1
ABB机器人管线包 3HNA016041-001
ABB机器人电源分配板 DSQC611 3HAC13389-2
ABB机器人电源分配板 DSQC662 3HAC026254-001
ABB机器人伺服卡HVC-02 3HNA011999-001
ABB机器人电源模块 DSQC604 3HAC12928-1
ABB机器人电源模块 DSQC609 3HAC14178-1
ABB机器人变频器 3HAC037017-001
ABB机器人PlB-01板 3HNA006144-001
ABB机器人示教盒M2000 3HNE00313-1
ABB机器人配件 DSQC604 3HAC12928-1
ABB机器人电源模块 DSQC661 3HAC026253-001
ABB机器人风扇 3HAC025466-001 冷却风扇
ABB机器人IO卡 DSQC676 3HAC031612-001
ABB机器人控制单元 DSQC643 3HAC024488-001
ABB机器人电容型号:3HAC025562-001
ABB机器人驱动器 DSQC663 3HAC029818-001
ABB机器人驱动器3HAC14546-2 04A
ABB机器人驱动器3HAC14546-6
ABB机器人驱动器3HAC025338-002
ABB机器人示教器DSQC679 3HAC028357-001
ABB机器人伺服电3HAC020208-001
ABB机器人伺服电机3HAC17484-6
ABB机器人配件 DSQC 352A 3HNE00009-1/11
ABB机器人整流驱动器:3HAC14549-2-10A
ABB机器人轴计算板 DSQC668 3HAC029157-001
ABB机器人轴计算板 DSQC668 AC029157-001
ABB机器人主板 DSQC639 3HAC025097-001
ABB机器人主机 DSQC661 3HAC026253-001
ABB机器人主机 DSQC663 3HAC029818-00107
ABB机器人主计算机单元型号:DSQC639 3HAC041443-003
ABB机器人输送链跟踪板模块 DSQC377B 3HNE01586-1
ABB控制柜 控制器IRC5,S4P+,S4CPlus,S2,S3,S4
ABB机器人计算机板 DSQC540 3HAC14279-1
ABB示教器3HAC028357-001
ABB示教器3HNE00313-1
ABB机器人***B信号通讯电缆 3HAC2493-1
ABB机器人配件 DSQC 352A 3HNE00009-1/11
ABB示教器电缆线 3HAC031683-001
ABB示教器电缆线 3HAC0311683-001
ABB示教器连接线 3HAC039054-002
ABB示教器急停按钮 扭动释放型CE3T-10R-02
ABB机器人配件 DSQC604 3HAC12928-1
ABB机器人动力电缆线 3HAC026787-001
ABB机器人编码器电缆 3HAC7998-1
ABB示教器液晶 ABB示教盒液晶屏
ABB机器人变压器3HAC024144-001
ABB机器人变压器3HAC037015-001/01
ABB机器人控制柜线缆 3HAC024254-001
ABB机器人控制柜通讯线缆 3HAC024254-007
ABB机器人控制柜通讯线缆 3HAC028585-001
ABB机器人电机 3HAC17332-1
ABB机器人电机 3HAC17333-1
ABB机器人电机 3HAC17338-1
ABB机器人电机 3HAC17339-1
ABB机器人电机 3HAC17344-1
ABB机器人电机 3HAC028954-2
ABB机器人电机 3HEA505951
ABB机器人电机 3HNP03386-1
ABB机器人电机型号:3HAC025062-00301
ABB机器人IO板 接口板型号:3HAC17970-1
ABB机器人PlB-01板 3HNA006144-001
ABB机器人控制柜电容型号:3HAC020150-00103
ABB机器人驱动:DSQ***06 3HAC035301-001 04
ABB喷涂机器人示教器:3HNE00442-106
ABB喷涂机器人示教器型号3HNA012283-001
ABB示教器型号:3HAC028357-001
ABB IRB660IRB460机器人物料搬运码垛机器人
ABB IRB1410机器人驱动单元DSQC643 3HAC024488-001
ABB IRB1410机器人伺服电机3HAC17346-1
ABB IRB1410机器人主板 DSQC639 1410-500503
abb1410机器人驱动 DSQ***06 3HAC036301-001
ABB1410机器人驱动电源DSQC661 3HAC026253-001
ABB机器人薄膜开关ABB 示教盘面板 3HNE00313-1
ABB机器人备用电容 3HAC025562-001
ABB机器人电机 3HAC17484-6
ABB机器人电源分流器 DSQC662 3HAC026254-001
ABB机器人风扇 3HAC029105-001
ABB机器人急停开关 CE3T-10R-03
ABB机器人模拟量IO模块 DSQC651 3HAC025784-001
ABB机器人配件 3HAC025582-001
ABB机器人配件 DSQC633 3HAC021905-001杆03
ABB机器人配件:DSQC345C 3HAB8101-3杆12C
ABB机器人配件 3HAC16035-1 03
ABB机器人配件 3HAC025582-001
ABB机器人配件 DSQC633 3HAC021905-001杆03
ABB机器人配件:DSQC345C 3HAB8101-3杆12C
ABB机器人驱动模块 3HAC14551-2
ABB机器人驱动器 3HAC17282-1
ABB机器人驱动器 DSQC619 3HAC14550-4
ABB机器人伺服电机3HAC17345-1
ABB机器人整流器 DSQC618 3HAC14549-3
ABB机器人轴计算基板 DSQC601 3HAC12815-1
ABB机器人轴计算基板 DSQC668 3HAC029157-001
ABB机器人主机 DSQC623
ABB机器人主机 DSQC623 3HAC020079-001
ABB机器人总线卡 DSQC637 3HAC023047-001
ABB机器人总线卡 DSQC658 3HAC025779-001
ABB示教器,全新进口原装触摸板5D17W080017
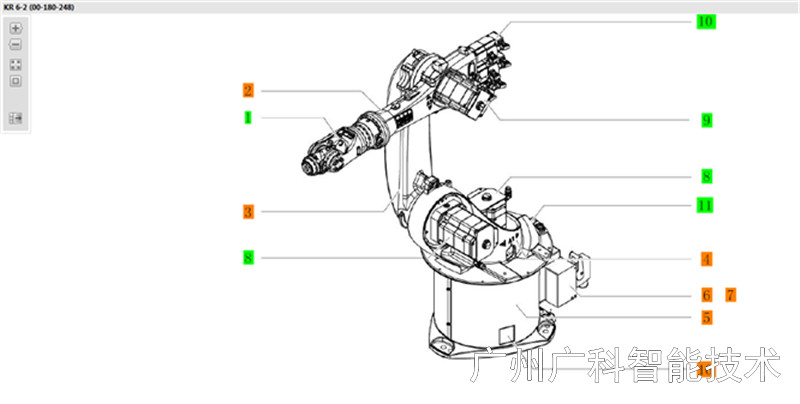
我们邀您共同进步!中国制造业发展的步伐越来越快,中国工厂使用的工业机器人数量越来越多,要想成为工业机器人技术型人才,工业机器人的内部构造必须要了解,下面为大家介绍一下通用工业机器人的构造。先来看一个视频,了解工业机器人的主要内部结构构造。中国制造业发展的步伐越来越快,中国工厂使用的工业机器人数量越来越多,要想成为工业机器人技术型人才,工业机器人的内部构造必须要了解,下面为大家介绍一下通用工业机器人的构造。一、机器人驱动装置概念:为使机器人运行起来, 给各个关节即运动自由度安装的传动装置。作用:提供机器人各部位、各关节动作的原动力。驱动系统:可以是液压传动、气动传动、电动传动系统, 或者把它们结合起来应用的综合系统; 可以是直接驱动或者是通过同步带、链条、轮系、谐波齿轮等机械传动机构进行间接驱动。1电动驱动装置电动驱动装置的能源简单,速度变化范围大,效率高,速度和位置精度都很高。但它们多与减速装置相联,直接驱动比较困难。电动驱动装置又可分为直流(DC)、交流(AC)伺服电机驱动和步进电机驱动。 直流伺服电机电刷易磨损,且易形成火花。无刷直流电机也得到了越来越广泛的应用。 步进电机驱动多为开环控制,控制简单但功率不大,多用于低精度小功率机器人系统。电动上电运行前要作如下检查:1)电源电压是否合适(过压很可能造成驱动模块的损坏); 对于直流输入的+/-极性一定不能接错,驱动控制器上的电机型号或电流设定值是否合适(开始时不要太大)。2)控制信号线接牢靠,工业现场好要考虑屏蔽问题(如采用双绞线)。3)不要开始时就把需要接的线全接上,只连成基本的系统,运行良好后,再逐步连接。4)一定要搞清楚接地方法,还是采用浮空不接。5)开始运行的半小时内要密切观察电机的状态,如运动是否正常,声音和温升情况,发现问题立即停机调整。2液压驱动通过高精度的缸体和活塞来完成,通过缸体和活塞杆的相对运动实现直线运动。优点:功率大,可省去减速装置直接与被驱动的杆件相连,结构紧凑,刚度好,响应快,伺服驱动具有较高的精度。缺点:需要增设液压源,易产生液体泄漏,不适合高、低温场合,故液压驱动目前多用于特大功率的机器人系统。选择适合的液压油。 防止固体杂质混入液压系统,防止空气和水***液压系统 。机械作业要柔和平顺,避免粗暴,否则必然产生冲击负荷,使机械故障频发,大大缩短使用寿命。要注意气蚀和溢流噪声。作业中要时刻注意液压泵和溢流阀的声音,如果液压泵出现气蚀噪声,经排气后不能消除,应查明原因排除故障后才能使用。 保持适宜的油温。液压系统的工作温度一般控制在30~80℃之间为宜。3气压驱动气压驱动的结构简单,清洁,动作灵敏,具有缓冲作用。但与液压驱动装置相比,功率较小,刚度差,噪音大,速度不易控制,所以多用于精度不高的点位控制机器人。(1)具有速度快、系统结构简单,维修方便、价格低等特点。适于在中、小负荷的机器人中采用。但因难于实现伺服控制,多用于程序控制的机械人中,如在上、下料和冲压机器人中应用较多。(2)在多数情况下是用于实现两位式的或有限点位控制的中、小机器人中的。(3)控制装置目前多数选用可编程控制器(PLC控制器)。在***、***场合下可采用气动逻辑元件组成控制装置。二、直线传动机构传动装置是连接动力源和运动连杆的关键部分,根据关节形式,常用的传动机构形式有直线传动和旋转传动机构。直线传动方式可用于直角坐标机器人的X、Y、Z向驱动,圆柱坐标结构的径向驱动和垂直升降驱动,以及球坐标结构的径向伸缩驱动。直线运动可以通过齿轮齿条、丝杠螺母等传动元件将旋转运动转换成直线运动,也可以有直线驱动电机驱动,也可以直接由气缸或液压缸的活塞产生。1齿轮齿条装置通常齿条是固定的。齿轮的旋转运动转换成托板的直线运动。优点:结构简单。缺点:回差较大。2滚珠丝杠在丝杠和螺母的螺旋槽内嵌入滚珠,并通过螺母中的导向槽使滚珠能连续循环。优点:摩擦力小,传动效率高,无爬行,精度高缺点:制造成本高,结构复杂。自锁问题:理论上滚珠丝杠副也可以自锁,但是实际应用上没有使用这个自锁的,原因主要是:可靠性很差,或加工成本很高;因为直径与导程比非常大,一般都是再加一套蜗轮蜗杆之类的自锁装置。三、旋转传动机构采用旋转传动机构的目的是将电机的驱动源输出的较高转速转换成较低转速,并获得较大的力矩。机器人中应用较多的旋转传动机构有齿轮链、同步皮带和谐波齿轮。1齿轮链(1)转速关系(2)力矩关系2同步皮带同步带是具有许多型齿的皮带,它与同样具有型齿的同步皮带轮相啮合。工作时相当于柔软的齿轮。优点:无滑动,柔性好,价格便宜,重复***精度高。缺点:具有一定的弹性变形。3谐波齿轮谐波齿轮由刚性齿轮、谐波发生器和柔性齿轮三个主要零件组成,一般刚性齿轮固定,谐波发生器驱动柔性齿轮旋转。主要特点:(1)传动比大,单级为50300。(2)传动平稳,承载能力高。(3)传动效率高,可达70%90%。(4)传动精度高,比普通齿轮传动高34倍。(5)回差小,可小于3。(6)不能获得中间输出,柔轮刚度较低。谐波传动装置在机器人技术比较***的***已得到了广泛的应用。仅就日本来说,机器人驱动装置的60%都采用了谐波传动。美国送到月球上的机器人,其各个关节部位都采用谐波传动装置,其中一只上臂就用了30个谐波传动机构。前苏联送入月球的移动式机器人登月者,其成对安装的8个轮子均是用密闭谐波传动机构单独驱动的。德国大众汽车公司研制的ROHREN、GEROT R30型机器人和法国雷诺公司研制的VERTICAL 80型机器人等都采用了谐波传动机构。四、机器人传感系统1、感受系统由内部传感器模块和外部传感器模块组成, 用以获取内部和外部环境状态中有意义的信息。2、智能传感器的使用提高了机器人的机动性、适应性和智能化的水准。3、智能传感器的使用提高了机器人的机动性、适应性和智能化的水准。4、对于一些特殊的信息,传感器比人类的感受系统更有效。五、机器人位置检测旋转光学编码器是常用的位置反馈装置。光电探测器把光脉冲转化成二进制波形。轴的转角通过计算脉冲数得到,转动方向由两个方波信号的相对相位决定。感应同步器输出两个模拟信号轴转角的正弦信号和余弦信号。轴的转角由这两个信号的相对幅值计算得到。感应同步器一般比编码器可靠,但它的分辨率较低。电位计是直接的位置检测形式。它连接在电桥中,能够产生与轴转角成正比的电压信号。但是,分辨率低,线性不好,以及对噪声敏感。转速计能够输出与轴的转速成正比的模拟信号。如果没有这样的速度传感器,可以通过对检测到的位置相对于时间的差分得到速度反馈信号。六、机器人力检测力传感器通常安装在操作臂下述三个位置:1、安装在关节驱动器上。可测量驱动器/减速器自身的力矩或者力的输出。但不能很好地检测末端执行器与环境之间的接触力。2、安装在末端执行器与操作臂的终端关节之间,可称腕力传感器。通常,可以测量施加于末端执行器上的三个到六个力/力矩分量。3、安装在末端执行器的指尖上。通常,这些带有力觉得手指内置了应变计,可以测量作用在指尖上的一个到四个分力。七、机器人-环境交互系统1、机器人-环境交互系统是实现工业机器人与外部环境中的设备相互联系和协调的系统。2、工业机器人与外部设备集成为一个功能单元,如加工制造单元、焊接单元、装配单元等。也可以是多台机器人、多台机床或设备、多个零件存储装置等集成 。3、也可以是多台机器人、多台机床或设备、多个零件存储装置等集成为一个去执行复杂任务的功能单元。八、人机交互系统请输入标题人机交互系统是使操作人员参与机器人控制并与机器人进行联系的装置。 该系统归纳起来分为两大类: 指令给定装置和信息显示装置。 美的集团联合库卡推出远程***机器人