




SGB10,SGB15N,SGB15,SGB20N,SGB20,SGB25N,SGB25,SGB35,SGB35N,SGR10,SGR15
N,SGR15,SGR20N,SGR20,SGR25N,SGR25,SGR35,SGR35N,SGW10,SGW15,SGW20,SG
W25,OSG-15,OSG-20,OSG25,OSG30,OSG40,OSGN-15,OSGN-20,OSGN25,OSG30N,OSG入寿命。CHEUNBOK SCERW轴承丝杆能保证安静运作,在高速2000mm/S时,噪音为70db,高精度圆形轴承大大降低噪音,而滚珠丝杆只要有其中一个滚珠质量问题就会产生噪音,需要更换整个螺母。
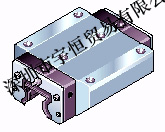
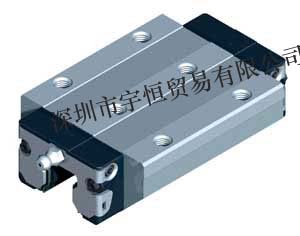
E-LINE滑轨规格型号:R2035-104-31 R2035-804-31 R2035-204-31
E-LINE自润单元:2030-125-00 2030-825-00 2030-226-00
力士乐滑块,STAR滑块,STAR轴承,Rexroth滑块,力士乐轴承,Rexroth轴承,力士乐滑轨,STAR滑轨,Rexroth滑轨,力士乐螺母,STAR螺母,Rexroth螺母,力士乐丝杆,STAR丝杆,Rexroth丝杆,力士乐线性导轨,STAR线性导轨,Rexroth导轨,力士乐线轨,STAR线轨,Rexroth线轨,力士乐直线导轨,STAR直线导轨,Rexroth直线导轨,力士乐线性导轨轴承丝杆,力士乐直线运动轴承,力士乐直线运动导轨,力士乐Rexroth滑块,星牌Star滑块,星牌Star螺母,星牌Star丝杆 for 3 - DOF parallel planar manipulators[J ] . Mech. Mach. Theo2 ry , 1996 , 31 (2) : 161 - 171. [ 35 ] Gao F , Guy F , Gruver W A. Criteria based analysis and design of t hree - degree - of - *** plane robotic wrist [ C] . Proc. of Int . Conf . on Robotics and Automation , New Mexico , 1997 : 468 473. [ 36 ] Gao F , Liu X , Gruver W A. Performance evaluation of two degree of *** planar parallel robots[J ] . Mech. Mach. Theory , 1998 , 33 (2) : 661 - 668. [37 ] Gosselin C M , Angels J . The optimum design of a planar t hree degree - of - *** parallel manipulator [ J ] . A*** E J . Mech. Trans. Autom. Des. , 1988 , 110 (1) : 35 - 41. [ 38 ] Gosselin C M , L***oie E. On t he kinematic design of spherical t hree - degree - *** parallel manipulators[J ] . J . Robotic Research , 1993 , 12 (