



1 概述
本公司研发生产的 BLDC 驱动器是一款高性能,多功能,低成本的带霍尔传感器直流无刷驱动器。 全数字式设计使其拥有灵活多样的输入控制方式,极高的调速比,低噪声,完善的软硬件保护功 能,驱动器可通过串口通信接口与计算机相连,实现 PID 参数调整,保护参数,电机参数,加减 速时间 等参数的设置,还可进行 IO 输入状态,模拟量输入,告警状态及母线电压的监视。
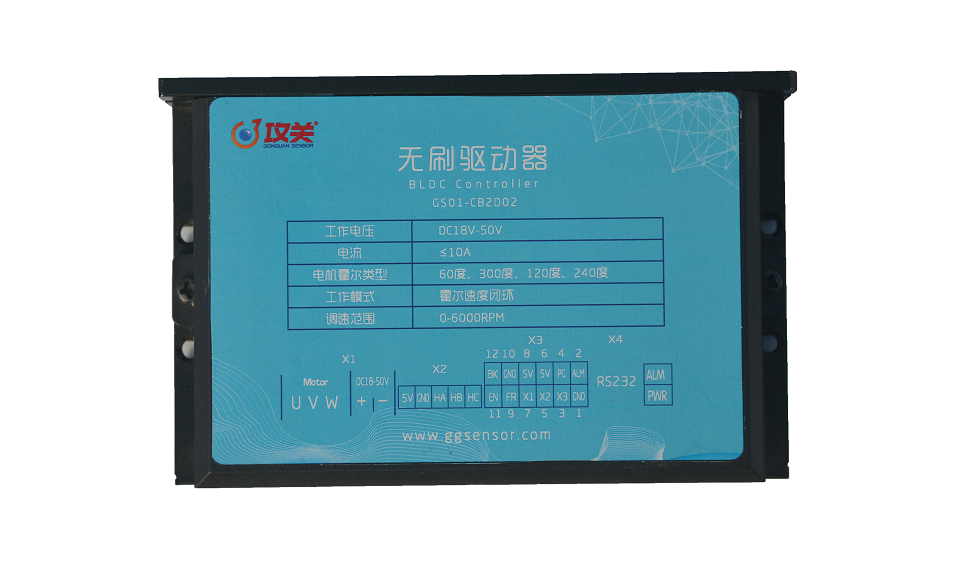
1.1 驱动器参数列表
|
输入电压 |
DC18V-50V |
|
工作电流 |
<=10A |
|
电机霍尔类型 |
60 度,300 度,120 度,240 度 |
|
工作模式 |
霍尔速度闭环 |
|
调速方式 |
0-5V 模拟量输入, |
|
|
0-100%PWM 输入(PWM 频率范围:1KHz-20KHz) |
|
|
内部给定, |
|
|
多段速 1, |
|
|
多段速 2, |
|
调速范围 |
0—6000RPM |
|
保护功能 |
l 短路:当异常电流大于 50A 时,产生短路保护 |
|
|
l 过流:当电流超过工作电流设置值并持续一设定时间 |
|
|
后产生过流保护 |
|
|
l 过压:当电压超过 55V 时产生过电压保护。 |
|
|
l 欠压:当电压低于 18V 时产生欠电压保护。 |
|
|
l 霍尔异常:包括相位异常及值异常. |
|
工作环境 |
场合:无腐蚀性,易燃,易爆,导电的气体,液体,粉尘 |
|
|
温度:-10-55 ℃(无冻霜) |
|
|
湿度:小于 90%RH(不结露) |
|
|
海拔:小于 1000m |
|
|
振动:小于 0.5G, 10hz—60hz(非连续运行) |
|
|
防护等级:IP21 |
|
散热方式 |
自然风冷 |
|
尺寸大小 |
120*76*33 单位:mm |
|
重量 |
250g |
1.2 特点
l 速度 PID 闭环控制,低速转矩大,
l 调速范转宽,0-6000RPM
l 运行加减速时间可由软件设定,实现平滑柔和运行。
l 驱动器自身损耗小,效率高,温升低,因此体积小,易安装
l 多种速度控制方式,由软件设定。
l 使能,方向,刹车输入信号的极性可由软件设定
l 多种完善的保护功能。
l 内置刹车电阻及控制电路(可选),用于消耗再生能量,防止过电压。
2 接口定义与连接图

各端子在面板上的位置
2.1 控制信号输入输出端
2.1.1 引脚列表

引脚排列及相关名称
|
端子引脚号 |
引脚名 |
定义说明 |
|
1 |
GND |
信号地 |
|
2 |
ALM |
报警输出(开漏)电流应限制在 20mA 内 |
|
3 |
X1 |
多段速输入 1 |
|
4 |
PG |
霍尔信号异或输出(开漏)电流应限制在 20mA 内 |
|
5 |
X2 |
多段速输入 2 |
|
6 |
5V |
5V 电源输出,输出电流应少于 20Ma (内部为线性电源,过大电流会导致过热) |
|
7 |
X3 |
多段速输入 3 |
|
8 |
SV |
模拟信号输入 |
|
9 |
FR |
方向控制信号 |
|
10 |
GND |
信号地 |
|
11 |
EN |
使能信号,低电平有效 |
|
12 |
BK |
刹车信号,高电平刹车,正常应接 GND |
2.1.2 引脚 X1,X2,X3,EN,BK,FR 对应的内部电路

2.1.3 引脚 PG,ALM 对应的内部电路

2.2 霍尔信号输入端

引脚排列及相关名称
2.3 功率端子

功率端的引脚排列
|
端子引脚号 |
引脚名 |
定义说明 |
|
1 |
GND |
电源输入负端 |
|
2 |
VDC |
电源输入正端 DC18-50V |
|
3 |
W |
电机相线 W |
|
4 |
V |
电机相线 V |
|
5 |
U |
电机相线 U |
2.4 通信接口
驱动器采用串行通信方式与计算机相连。接口为 RS232 电平。必须通过厂 商提供的专用电缆才能与计算机相连。物理接口采用 RJ12—6PIN 的电话插座, 其引脚排列如下图,引脚号对应名称在下表中描述。
 RJ12 座引脚图
RJ12 座引脚图
|
端子引脚号 |
引脚名 |
定义说明 |
|
1 |
NC |
空 |
|
2 |
TXD |
MCU 数据发送端 |
|
3 |
VCC |
5V 电源 |
|
4 |
RXD |
MCU 数据接收端 |
|
5 |
GND |
地 |
|
6 |
NC |
空 |
2.5 典型接线图

3 控制端口功能说明
3.1 模拟量/PWM 输入端子 SV
SV 用于模拟量输入或者 PWM 输入端,当在 BLDC_2 软件的输入设置为“模拟输入”或者 “PWM 输入”方式时,该端口输入的量作为速度的给定值,下面是接线图及说明。
3.1.1 可调电阻调节模拟输入
 图中可调电阻的阻值应在 5K-10K 之前,在接分压电阻时应先确认好电阻的两 端及中间抽头再连接,错误的接法有可能使 5V 电源短路导致驱动器损坏。若连接后, 或在调节分压电阻时,驱动器电源 LED 指示灯变暗或者灭掉,应立即断开驱动器电源, 重新认确电阻引脚后再接。
图中可调电阻的阻值应在 5K-10K 之前,在接分压电阻时应先确认好电阻的两 端及中间抽头再连接,错误的接法有可能使 5V 电源短路导致驱动器损坏。若连接后, 或在调节分压电阻时,驱动器电源 LED 指示灯变暗或者灭掉,应立即断开驱动器电源, 重新认确电阻引脚后再接。
3.1.2 外部 0-10V 模拟量输入
 当 SV 连接外部模拟量输入时,应注意输入的模拟电压应小于 5V,否则有可能损伤 内部电路,高于 5V 时应采用分压电阻分压,以保证分压后的电压最大值小于 5V。
当 SV 连接外部模拟量输入时,应注意输入的模拟电压应小于 5V,否则有可能损伤 内部电路,高于 5V 时应采用分压电阻分压,以保证分压后的电压最大值小于 5V。
3.1.3 SV 用作 PWM 输入端

PWM 输入接线图
驱动器中的 SV 用于 PWM 输入时,其输入量是开关量,应满 5V 电平要求。该 PWM 是真正的 PWM 输入,并非是 PWM 滤波后转为模拟量输入。该 PWM 输入信号的占空比可 为 0 到 100%任意值, PWM 频率应在 1KHz-20KHz 之间,频率偏向低则 PWM 精度高。建议 PWM 频率设定在 2KHz
3.2 FR 正反转方向控制端子
FR 端子用于控制电机转动方向。FR 端子不同电平切换时会根据加减速时间设 定值,先减速到 0,然后切换方向再从 0 速加度到给定值。如果电机拖动的负载惯量
大,应适当加大加减速时间,否在方向切换时有过流或者电压过高的情况。
3.3 EN 电机使能端子
EN 脚与 GND 的接通与断开可控制电机的运行与停止,只有在 EN 脚与 GND 连 接时其它的操作才能被允许,若断开则电机处于自由状态,其它的操作被禁能。 当电机出现故障时,可以先断开 EN 引脚,然后再接通来清除故障。
3.4 BK 刹车控制端子
当 BK 脚与 GND 脚的断开时, 驱动器将三根相线短路,电机处于制动状态。当 BK 脚与 GND 脚的接通时,电机脱离制动状态。如果电机处于高速或者负载惯量 比较大时,刹车对电气和机械装置产生冲击,损害大。除安全紧急制动外,应避 免此类制动行为。为了减小动作时间,尽量把速度减少到比较安全范围再进行刹 车。
3.5 X1,X2,X3 多段速控制端子 在配置软件中可设置多段速输入模式
多段速模式有两种,分别为模式 1 及模式 2,模式 1 为译码方式,模式 2 为位选 方式。
3.5.1 多段速模式 1
X1,X2,X3 与 GND 的断开或导通可以组合成 8 种不同的状态对应 8 段不同的 速度。通过不同状态的切换实现不同的转速,不同转速过渡按设定的加减速时间 进行。
|
X1--GND |
X2--GND |
X3--GND |
速度段 |
值 |
|
徐州攻关传感技术有限公司电话:传真:联系人:
地址:主营产品:传感器、AGV、其他传感设备
Copyright © 2026 版权所有: 产品网店铺主体:徐州攻关传感技术有限公司
免责声明:以上所展示的信息由企业自行提供,内容的真实性、准确性和合法性由发布企业负责。产品网对此不承担任何保证责任。
|