




6GK5416-4GS00-2AM2
基于建模目前存在标准与接口的问题:控制、机械、安全、材料、工艺等建模各自为政,平台差异,无法实现统一的协同仿真。
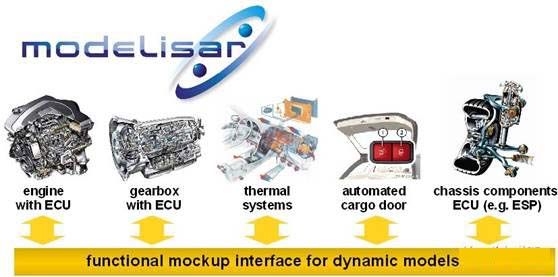
图7-汽车行业正在实施多种建模仿真的协同
创新往往基于原创性设计,遵循***性原理,那么就会回归到物理与材料,目前的各种建模仿真软件间就缺乏统一的协同仿真接口,尽管FMU/FMI正在开发,其目前也主要在已经非常成熟的汽车工业应用领域开始。
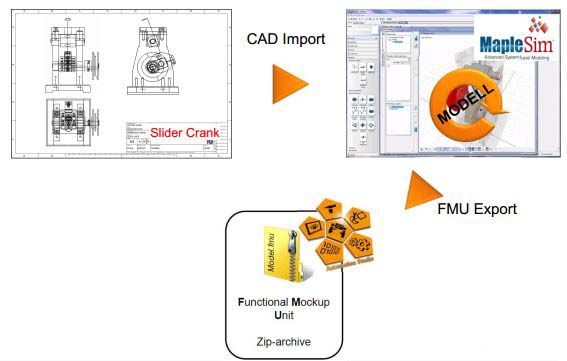
图8-基于FMU/FMI实现机电协同仿真
如图8可以将机械的数据与控制的算法通过FMI接口实现对接,机械的调整与控制算法可以实现交互,在产线中实现变化中的虚拟仿真,进而验证与设备虚拟调试。它能带来的好处非常多,但是,却很少有制造业的工程师掌握这些工具与方法,而又大喊创新之难。
6GK5416-4GS00-2AM2
小数据应用场景
如果是控制可以微秒采样,但如果是管理运营不需要低周期,但数据量不大,如故障信号多,但如果故障信号多意味着设备质量不过关本身就没有市场。

图9-预测性维护场景的尴尬—数据量大则意味着故障多
与离散制造业相比,流程工业本身基于连续的生产,因此在传统上产生了很多已有的学习模型,就像自适应控制、卡尔曼滤波、模糊控制算法很多实际上已经有较为成熟的参数与模型学习的方法。
(1)卡尔曼滤波器
R.E.Kalman等人发明的卡尔曼滤波器是用于估计或学习系统状态的数学框架,估计器会给出位置和速度在统计上的***佳估计。卡尔曼滤波器也可以用于识别系统参数,因此,卡尔曼滤波器就位识别状态与参数提供了数学框架。
该领域也称为系统辨识(或系统识别)。系统辨识是识别任意系统的参数和结构的过程。
卡尔曼滤波器可以从贝叶斯定理推导出,在贝叶斯解释中,定理引入了证据对信念的影响。改定理提供了一个严格的数学框架,用于纳入任何具有一定程度上不确定性的数据,简单来说,给定目前所有的证据(或数据),贝叶斯定理可以让你确定新证据如何影响信念,对于状态估计,就是对状态估计准确性的信念。
(2)自适应控制
控制系统需要以一种可预测可重复的方式对环境做出反应,控制系统对环境进行测量并且通过改变测量值来实现控制过程。通常控制系统以全部的参数都硬编码到软件的方式进行设计和实现,这种方式在大多数情况下效果良好,特别是当系统在设计过程中已知时,当系统定义不明确或预期在运行期间会发生显著变化时,实施学习控制就变得非常必要。

图10-采用***网络学习的自适应控制系统(飞行控制)
6GK5416-4GS00-2AM2