





赛普肯原有的SOMANET伺服驱动器作为通用产品,已被应用于传统工业机械臂、协作机器人、服务机器人、AGV、特种机械等尖端应用领域。Circulo系列是在SOMANET的技术基础上,针对协作机器人一体化关节,将传感、驱动、制动、传动集成一同纳入设计考虑推出的高度集成化产品。其不仅在结构外形上更适应一体化关节集成,具备模块化、易走线等特点,还为用户提供可选的集成单/双编码器方案、制动方案,对关节内部的部件集成提供设计参考和技术咨询,最终通过高度集成化设计和技术支持,在提高终端产品可靠性和性能的同时,降低用户硬件和工程成本。

Circulo系列伺服驱动器技术剖析
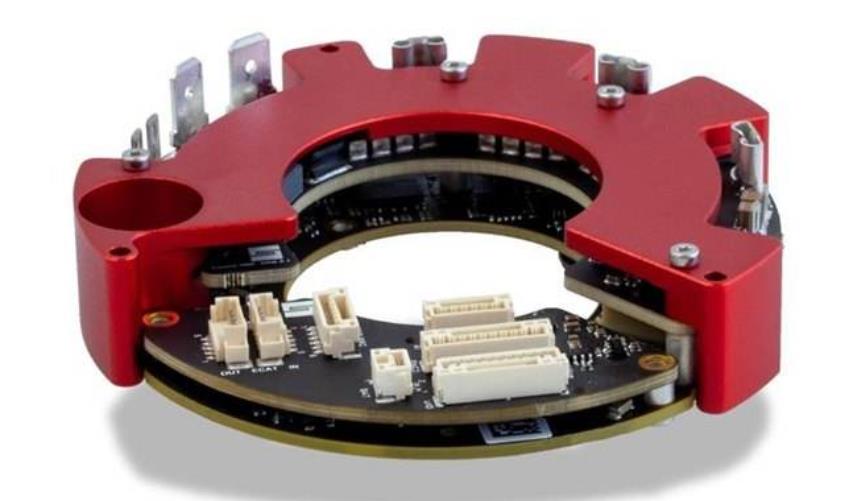
Circulo系列伺服驱动采用模块化架构,本体由IO模块、处理器模块、驱动模块、可选的传感模块和可定制的集成散热结构组成。目前系列包含两个尺寸,分别是输出700W,内径20mm,外径72mm的Circulo 700,和输出1800W,内径40mm,外径92mm的Circulo 1800,并为深度用户提供基于机械结构定制的尺寸微调。
Circulo伺服驱动器主要面向常见于机器人关节的三相交流电机,如直流无刷(BLDC)、永磁同步(PMSM),并可选于本体集成两枚绝dui值编码器(18位,可选电池多圈),内含自动校准。除内置编码器外,其也提供外部编码器接口,可适配最多两枚外接编码器,支持ABZ、SSI、BiSS-C、A-format等协议。在提供集成式产品加速机器人研制开发的同时,也提供适配的自由度,利于过渡及测试。
Circulo伺服驱动器在控制算法方面
采用独有的基于模型预测的矢量控制算法(Model-predictive FOC),结合采用最先进的开关元件制作的现代微型逆变器,使得驱动器在维持高控制频率,满足精密控制需求的同时维持低热耗,满足微型驱动产品需求。其本体也在多年的经验积累下,综合考虑了一体化关节的集成设计,提供充分的散热能力。
在通信方面
其采用EtherCAT总线通讯技术。作为基于以太网的新一代总线技术,EtherCAT具有领先的实时性和同步性,并支持多种设备连接拓扑结构。同时为了满足不同用户的需求,赛普肯还可以提供Ethernet、CANopen、PROFINET、SERCOS III、Ethernet/IP等通讯支持。
在功能安全性方面
Circulo板载基于24V I/O的STO(安全转矩关断)和SBC(安全抱闸控制)功能,结合安全模块将为用户提供SIL3 PLe级别的安全保护赛普肯还为产品配备了专门的调试工具OBLAC,其直观的用户界面提供多种调试功能,使得用户的设置调试过程十分简便。软件提供基于系统辨识和主导极点配置的控制器自动调参功能,为用户一键实现鲁棒控制,并提供响应时间、带宽等参数滑条,供用户拖拽实现控制器微调,同时也为熟练用户提供手动调试接口。
Circulo 作为一款标准伺服产品,开创性的首次实现了协作机器人关节需求的全面覆盖,支持双/ 单编码器方案,同时可选集成编码器方案,驱动器自带单/双绝dui值编码器(18 Bit),与传统双编码器方案相比,节省50%以上空间,同时提供24V I/O的STO和SBC功能,超简化接线,同时可提供插销式制动器可选配置以及电机温度传感器接口(PT100,PT1000,KTY)。

功能特点
1.模块化结构–便于快速调整,如接口 PCBA 及编码器磁环。
2.简化布线–菊花链结构覆盖 EtherCAT、逻辑供电、STO和 SBC。
3.安全性–板载基于24VI/O的STO和SBC(安全抱闸控制),TÜV认证SIL3PL-e。
4.超高效率–基于模型预测的矢量控制算法,在保证高频率运动控制的同时维持低热耗。
更多选配和定制:
1.可选 PoE (Power over EtherCAT)
2.可选集成插销式抱闸,包含抱闸环
3.可选集成1到2枚绝dui值编码器(18位,可选14位电池多圈)
4.安全运动模块,包含基于 FSoE,SIL 3 PL-e 级别的STO, SBC, SS1, SS2, SLP, SLV, SP

技术参数
|
规格型号 |
C700 |
C1800 |
|
驱动电机类型 |
BLDC/PMSM |
|
|
额定电压 |
12-48VDC(Max 65VDC) |
|
|
持续电流 |
8 Arms |
20Arms |
|
峰值电流(负载循环0.5s/1.5s) |
24Arms |
60Arms |
|
反馈类型 |
1 x ABI/SSI/BISS-C/Nikon/Tamagawa |
|
|
支持通讯 |
EtherCAT |
|
|
模拟量输入 |
4 × 5 V DIO, 1 × 24 V DI |
|
|
制动器输出 |
1A@0-48V PWM 输出 |
|
|
效率 |
99% |
|
|
尺寸 |
OD 72mm,ID 20mm |
OD 92mm,ID 40mm |
|
保存温度 |
-35~85 °C |
|
|
环境温度 |
0 ~50 °C |
|
|
湿度 |
Max 90% rH |
|
|
集成编码器(电机端) |
可选 |
|
|
集成编码器(输出端) |
可选 |
|
|
集成制动器 |
可选 |
|
|
硬件保护 |
过电流,过电压,欠电压,温度 |
|
集成编码器技术指标:
|
编码器1(输入端) |
C700 |
C1800 |
|
分辨率 |
18bit |
|
|
多圈位数 |
14 bit(需要电池) |
|
|
安装位置及功能 |
1:输出端 -位置环反馈 @双编码器方案 2:电机端-位置/速度/电流环(换向)反馈 @单编码器方案 |
|
|
精度 |
待定 |
|

|
编码器2(输出端) |
C700 |
C1800 |
|
分辨率 |
18bit |
|
|
多圈位数 |
不支持 |
|
|
安装位置及功能 |
1:电机端(速度)@双编码器方案 |
|
注:
单编码器配套 编码器1
双编码器:配套编码器1+编码器2
集成制动器技术指标:

|
C700 |
C1800 |
|
|
制动方式 |
电磁式插销制动器 |
|
|
详细参数 |
待定 |
|
注:Light版本外径小(见CAD)不能集成制动器 集成制动器需提供设计沟通
应用
1.AGV
2.特种机械
3.协作机器人
4.服务机器人
5.服务机器人
6.传统工业机器人
