机器人上下料自动搬运旋耕刀锻造工件的解决方案
一、公司概况
苏州品超智能是张家港领军人才企业,专业从事机器人集成运用及提供精密非接触式三维测量系统、在线测量系统以及专业测量服务。
公司创始人是哈尔滨工业大学自动化专业博士、天津大学博士后。企业与江苏科技大学共同建立了科研实验室,从事自动化研发工作。公司核心团队2010年开始进入自动化领域,2013年开始研发机器人的系统运用。
企业的发展愿景是让广大客户从人力制造升级到智能制造不再是难事,为中国工业智能制造普及做出应有的贡献。

二、用户工厂现状
1、生产环境相对恶劣,防护设施简陋,易对人体带来极大的损害
2、自动化程度较低,所有工序都为人工完成。
3、工作强度较大。


三、工况需求:
1、利用机器人上下料方式代替传统手工方式进行上下料。
2、加热炉由客户改造,加热完成的工件每次掉落的个数保证在一个。(节拍可调)
3、因加热炉加热完毕的工件无法保证其方向,需在传送过程中进行改造定位。
4、输送方式由机器人完成,需对局部进行改造。
5、现有的设备与机器人信号连接通讯。
四、整体方案

1、机器人工位一:
从加热炉加热的工件,通过传送带带动工件移到定位装置上,并通过固定在前后位置处的检测开关,测出工件的位置信息。机器人根据工件位置信息,选择性的进行抓取,之后将物料放置到滚锻设备定位处,从而完成整套上料工作。
注:经与客户沟通,加热炉由客户改造完成,需要做到能调整速度,能控制单个工件下落。
节拍:预计为3S/PCS

2、机器人工位二:
从滚锻设备出来的工件,移动到定位装置上,通过机构动作完成定位。机器人二进行抓取工件,并将工件放置到冲床一模具上,完成上料工作。冲床一上工件加工完成后,机器人取出工件,并放置到换向定位装置上。
注:双抓爪设计,最快提升效率。节拍:预计为4S/PCS(注:会受磨具定位精度、放置难以程度影响)

3、机器人工位三:
放置到换向定位装置上的工件,机器人三通过固定在其旁的检测开关,得出工件信息并进行抓取。机器人抓取工件放置到冲床二放料位置,完成上料动作,检测到冲床二加工完成后,机器人取出工件放置到成品冷却池内,机器人完成一个周期所有工序。
注:双抓爪设计,最快提升效率。节拍:预计为3S/PCS(注:会受磨具定位精度、放置难易程度影响)

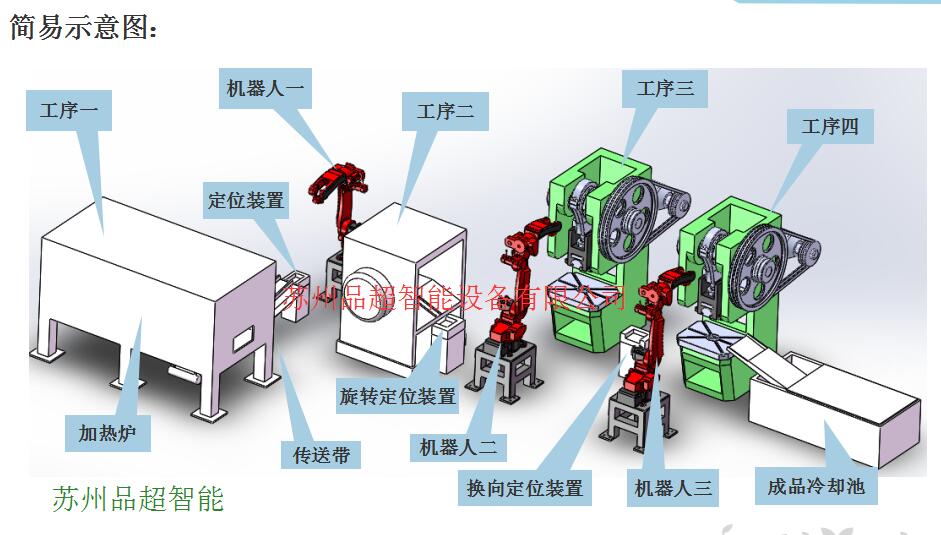
五、整体工艺流程说明:
1、人工将物料通过装置有序放置到加热炉中A;
2、加热炉中物料通过控制,逐个通过传送带流至定位装置B;
3、机器人一从B处抓取工件到滚锻设备中C进行锻压;
4、从锻压设备出来后物料到达定位装置D上;
5、机器人二抓取D处定位后的物料到冲床E进行上料;冲压完成后物料由机器人二取出,并放置到定位换向定位装置F上。同时机器人三接收到有物料的指令。
6、机器人三收到指令后,抓取工件到冲床G工作,加工完成后放到成品筐H;
7、以上循环动作。。。。
注:机器人二、三双抓爪设计,即除第一次和最后一次外,中途为取一个放一个。

以上为苏州品超智能设备有限公司为南通某锻造公司根据用户要求而设计的可用于加工中心、冲床、数控车床自动上下料搬运机器人方案