





德国西门子模块订货号6ES7277-0AA22-0XA0
 |
SIMATIC S7-200,PROFIBUS DP从站模块,9.6KB至12MB,1端口,PROFIBUS DP/MPI
|
SIEMENS西门子上海朕锌电气设备有限公司
联系人:田敏 (田工)
24小时销售及维修热线:15801871621
电 话:021-31038102 传 真:021-67226033
手 机:15801871621 Q Q : 1944287917
微信:az502684357
西门子系列高价回收
地址:上海市金山区枫湾路500号
在 SIMATIC F-CPU 上分布式使用安全激光扫描器,并采用 F-CPU 切换监控盒
-
文献
-
涉及产品
某个机器人装配间有 2 个工作站,操作员可以自由地轮流操作这 2 个工作站 。装配间运行期间,现场条件因机器人的移动而发生变化:危险区变成工作区,或,工作区变成危险区。

为了监控(人员和设备保护)这个危险区域不断改变的装配间,需要使用安全激光扫描器和故障安全控制器(PLC)。
解决方案
为解决上述问题,本应用示例采用了:
- 用于工厂自动化的 SIMATIC 安全集成技术:
硬件:SIMATIC S7-300 故障安全控制器
软件:STEP 7 V11 和 STEP 7 Safety Advanced V11 - SICK 安全激光扫描器
本应用示例实现了对两个不断变化的危险区域的监控。基于分布式技术,SICK 安全激光扫描器通过 PROFINET 连接至 SIMATIC F-CPU。

如何使用两个OLM建立冗余的光纤环网,LED将如何显示?
-
文献
-
涉及产品
说明:
对于多OLM可参考手册:条目号8331164
对于多OLM可参考FAQ:条目号19758281
建立带有两个PROFIBUS OLM的冗余光纤环网是冗余光纤环网的一种特殊情形,可以通过下列两个组态来实现。
组态 1:
_opt_redundater_ring_2_olms_t1_01_e.gif)
图 1: 冗余光纤PROFIBUS环网OLM1/CH2 => LWL1 => OLM2/CH3, OLM2/CH2 => LWL2 => OLM1/CH3
组态 2:
_opt_redundater_ring_2_olms_t1_02_e.gif)
图 2:冗余光纤PROFIBUS环网OLM1/CH2 => LWL1 => OLM2/CH2, OLM2/CH3 => LWL2 => OLM1/CH3
关于如何建立冗余光纤环网的提示:
- 只能用OLM /P12 /G12 /G12-1300和G12 EEC或OLM /P4 /S4 /S4-1300建立冗余光纤环网,这些是有两个光信道的OLM。
- 只有同一类型的OLM或者下列组合才能连接在一起:
- OLM/P12和OLM/P12
- OLM/G12和OLM/G12和OLM/G12 EEC
- OLM/G12-1300和OLM/G12-1300
- OLM/P4和OLM/P4
- OLM/S4和OLM/S4
- OLM/S4-1300和OLM/S4-1300 - 当前OLM与旧版本OLM的混合操作在兼容模式下是允许的(DIP开关S7=ON;警告:缺省设置 S7=OFF)。以下组合是可行的:
- OLM/P12和OLM/P4
- OLM/G12和OLM/S4
- OLM/G12-1300和OLM/S4-1300 - 注意事项:
带有集成FO(例如CP5613 FO, ET200S FO和CP 342-5 FO)接口的终端设备不支持接入冗余光纤环网。 - 参见条目号4884690和7542148。德国西门子模块订货号6ES7277-0AA22-0XA0
- 警告:
塑料光纤不能连接到带玻璃光纤的OLM,反之亦然。
冗余光纤环网中的LED显示特性:
从任何信道收到的消息被传送到其它所有信道。如果在光信道接收到消息,那么该消息也作为“回波”被送到该信道的发送器,并且作为一个监测消息来检查OLM之间的光纤段。
OLM识别接收到的消息是回波还是传送的消息。如果是回波消息,信道的LED将保持熄灭。如果是传送的消息,信道的LED将点亮黄灯。在多于两个OLM的网络中,回波信号和传送的信号紧 紧相连。由于显示延迟至少有300毫秒,因此所有信道LED将点亮黄灯。
在冗余光纤环网中,相似的LED显示特性仅在下列情况下发生:
1. 冗余光纤环网恰好由两个OLM组成,并且连接的两段光纤长度不同(差异> 大约2米)
在此条件下,接收OLM总是首先收到较短光纤连接的发送消息。该信道将点亮黄色信道LED来表明这种情况。在另一光信道的信号则被认为是“回波信号”,而其信道LED将保持 熄灭。由于连接的光纤长度是不变的,因此显示特性也是保持不变。
- 组态1(光纤线路1 < 光纤线路2),LED显示A:
- 操作实例,光纤线路没有中断:
OLM 1 OLM 2 系统 LED = 点亮绿灯 系统 LED = 点亮绿灯 CH1 LED = 点亮黄灯 CH1 LED = 点亮黄灯 CH2 LED = 点亮黄灯 CH2 LED = 不亮 CH3 LED = 不亮 CH3 LED = 点亮黄灯 - 错误实例,光纤线路1有中断
OLM 1 OLM 2 系统 LED = 点亮绿灯 系统 LED = 点亮绿灯 CH1 LED = 点亮黄灯 CH1 LED = 点亮黄灯 CH2 LED = 点亮红灯 CH2 LED = 点亮黄灯 CH3 LED = 点亮黄灯 CH3 LED = 点亮红灯 - 错误实例,光纤线路2有中断
OLM 1 OLM 2 系统 LED = 点亮绿灯 系统 LED = 点亮绿灯 CH1 LED = 点亮黄灯 CH1 LED = 点亮黄灯 CH2 LED = 点亮黄灯 CH2 LED = 点亮红灯 CH3 LED = 点亮红灯 CH3 LED = 点亮黄灯
- 组态 2 (光纤线路1 < 光纤线路2), LED显示A:
- 操作实例,光纤线路没有中断:
OLM 1 OLM 2 系统 LED = 点亮绿灯 系统 LED = 点亮绿灯 CH1 LED = 点亮黄灯 CH1 LED = 点亮黄灯 CH2 LED = 点亮黄灯 CH2 LED = 点亮黄灯 CH3 LED = 不亮 CH3 LED = 不亮 - 错误实例,光纤线路1有中断
OLM 1 OLM 2 系统 LED = 点亮绿灯 系统 LED = 点亮绿灯 CH1 LED = 点亮黄灯 CH1 LED = 点亮黄灯 CH2 LED = 点亮红灯 CH2 LED = 点亮红灯 CH3 LED = 点亮黄灯 CH3 LED = 点亮黄灯 - 错误实例,光纤线路2有中断
OLM 1 OLM 2 系统 LED = 点亮绿灯 系统 LED = 点亮绿灯 CH1 LED = 点亮黄灯 CH1 LED = 点亮黄灯 CH2 LED = 点亮黄灯 CH2 LED = 点亮黄灯 CH3 LED = 点亮红灯 CH3 LED = 点亮红灯
2. 冗余光纤环网恰好由两个OLM组成,并且连接的两段光纤长度也恰好相等
在此调经爱女下,接收OLM同时接收到两个光线信道的消息。为了控制这种情况,OLM为这两个光信道分配优先级别。通过定义,将一个光信道的消息作为回波(信道LED = 关闭),另一个光信道的消息作为传送的消息(信道LED = 黄色)。
由于两个光接收信道之间的抖动影响和扫描的差异,或许会有两个光信道轮流首先收到消息的情况。由于显示延迟至少有300毫秒,因此所有信道LED将点亮黄灯。
- 组态 1/2 (光纤线路1 = 光纤线路2), LED显示A:
- 操作实例,光纤线路没有中断:
OLM 1 OLM 2 系统 LED = 点亮绿灯 系统 LED = 点亮绿灯 CH1 LED = 点亮黄灯 CH1 LED = 点亮黄灯 (持续点亮,闪烁,闪烁) (持续点亮,闪烁,闪烁) CH2 LED = 点亮黄灯 CH2 LED = 点亮黄灯 (持续点亮,闪烁,闪烁) (持续点亮,闪烁,闪烁) CH3 LED = 点亮黄灯 CH3 LED = 点亮黄灯 (持续点亮,闪烁,闪烁) (持续点亮,闪烁,闪烁) - 错误实例,光纤线路1有中断
参见上面所述
- 错误实例,光纤线路2有中断
参见上面所述
总结:
不管信道LED是否点亮,冗余光纤环网中的所有光纤信道都被连续的监控。在信道LED没有点亮的情况下,该光纤信道中的消息是用来监测传送的长度。生产性的通信是通过LED点亮黄灯的那个信道进行的。
错误总是通过信道LED点亮红灯和警报 连接的形式发出通知信号的。推荐连接警报连接以确保
在ET200M深槽安装导轨上最多可以安装多少个ET200M有源总线模板?
-
文献
-
涉及产品
-
安装导轨的长度
-
安装导轨紧固孔的基本尺寸
安装导轨长度
表1列出了ET200M可用的安装导轨。
| 安装导轨长度 | 模块可用长度 | ET200M 总线模板最大数目 | 订货号 |
|---|---|---|---|
| 482.6 mm | 450 mm | 5 x 80mm 宽 BM (1+4) | 6ES7195-1GA00-0XA0 |
| 530 mm | 480 mm | 6 x 80mm 宽 BM (1+5) | 6ES7195-1GF30-0XA0 |
| 620 mm | 580 mm | 7 x 80mm 宽 BM (1+6) | 6ES7195-1GG30-0XA0 |
| 2000 mm | 根据需要截取 | - | 6ES7195-1GC00-0XA0 |
表 1
注意
与其它安装导轨不同,2米的安装导轨没有紧固孔,安装时需要钻孔,这样就可以根据需要来截取。
安装导轨紧固孔的尺寸
图1和表2列出了可插拔安装导轨的紧固孔尺寸。
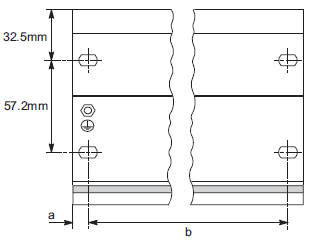
图. 1
| 安装导轨长度 | 距离 a | 距离 b |
|---|---|---|
| 482.6 mm | 8.3 mm | 466 mm |
| 530 mm | 15 mm | 500 mm |
| 620 mm | 15 mm | 590 mm |
表 2
图2 列出了2米安装导轨的紧固孔尺寸。
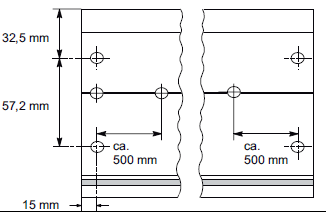
图. 2德国西门子模块订货号6ES7277-0AA22-0XA0
有源总线模板宽度
将接口模块放置到已经安装在ET200M安装导轨的第一个有源总线模板上,接口模块可以放置在以下有源总线模板上:
- BM PS/IM(订货号:6ES7195-7HA00-0XA0)
- BM IM/IM 作为冗余配置(订货号: 6ES7195-7HD10-0XA0)
在PS/IM 或 BM IM/IM的右侧安装IO模块的有源总线模板,有两种规格:
- 可以安装2个40 mm 宽的 IO 模块 (订货号: 6ES7195-7HB00-0XA0)
- 可以安装1个80 mm 宽的 IO 模块 (订货号: 6ES7195-7HC00-0XA0)
所有的有源总线模板都是80mm宽。
配置示例:482.6mm宽的ET200M安装导轨
可以安装最多5个80mm宽的有源总线模板在482.6mm宽的ET200M安装导轨上,这意味着:
- 一个BM PS/IM 或 BM IM/IM
- 最多4个IO模块的有源总线模板
在BM PS/IM上可以安装一个接口模块,例如IM153-4,如果在BM PS/IM右侧安装两个可以安装2个40 mm 宽的 IO 模块的有源总线模板及2个可以安装1个80 mm 宽的 IO 模块的有源总线模板,那么就还可以安装4个40mm宽的IO模块及2个80mm宽的IO模块
配置示例:530mm宽的ET200M安装导轨
530mm宽的ET200M安装导轨上可以安装最多6个80mm宽的有源总线模板在,这意味着:
- 一个BM PS/IM 或 BM IM/IM
- 最多5个IO模块的有源总线模板
配置示例:620mm宽的ET200M安装导轨
宽的ET200M安装导轨上可以安装最多7个80mm宽的有源总线模板在,这意味着:
- 一个BM PS/IM 或 BM IM/IM
- 最多6个IO模块的有源总线模板
MICROMASTER 4 (MM4): 如何使用MM440的转矩控制?
-
文献
-
涉及产品
传动装置广泛采用的是速度控制方式,但也有很多应用是需要转矩控制方式的。如何使用MM440的转矩控制?
MM440的转矩控制功能是很好的功能,可以应用于一些张力控制的场合,使用时需要注意以下问题:
1. 设定变频器为无速度传感器矢量控制模式。 参看FAQ文档"MM440:无速度传感器矢量控制(SLVC)" (FAQ ID: 7494205).
请确认变频器功能设置为SLVC,因为转矩控制运行于SLVC模式。
2. 通过参数P1500设定转矩控制的转矩给定源,参数P2003为基准转矩,代表100%对应的转矩值.
例如,P1500=2选择模拟量输入0~10V为转矩给定源。
3.通过参数P1300=22激活转矩控制功能.
4.实际转矩(Nm)可以通过参数r0031来监测(无论是否在转矩控制模式下),设置P0005=31,在显示画面中显示转矩值而非输出频率值.通过比较显示的转矩值和期望的转矩值可以知道转矩标定是否正确.
5.如有必要,可以用电流控制参数P1340和P1341来调整转矩控制环的稳定性,但通常无需该操作。
注意:在应用转矩控制时,如果没有负载电机会出现飞车,因此应设置一些其它的限制条件,如P1082(电机最大运行频率)等,或者设置一个频率超过阈值的指示输出,例如P0731=53.4(请看参数P2155的解释)。
提示1:采用转矩和频率控制运行
频率和转矩控制信号从两个不同的通道输入经常被用到。最好的实现方法是让MM440运行于无速度传感器矢量控制模式,频率主设定值由模拟量输入通道1得到,转矩限幅信号由模拟量输入通道2得到。实际上,这意味着仅有频率或转矩能被连续控制,模拟量输入通道2则作为限幅控制。
参数设置
P1000=2 (频率设定值来自模拟量输入通道1)
P1300=20 (无速度传感器矢量控制)
P1500=0
P1522=755.1 (转矩上限值来自模拟量输入通道2)
模拟量输入通道2可以通过P0756 - P0761下标1的参数来做标定。
转矩基准值可以通过P2003来调整。提示2:采用负转矩运行(例如放卷应用)
在上面的例子中,如果转矩为负,例如在放卷应用中,模拟量输入通道2可以连接至P1523,作为转矩下限值设定。需要重新标定模拟量输入通道2以允许负的设定值(例如0到10V对应0到-100%转矩)。
频率设定值也需要合适的标定(例如模拟量输入通道1的0到10V对应0到-50Hz)。提示3:采用正的和负的转矩运行
如果模拟量输入通道2控制的转矩既有正值又有负值,那就有必要用模拟量输入通道2同时调整P1522(例如0到100%)和P1523(例如0到-100%)。这可以通过PID环中的信号反相来实现。
- 将模拟量输入通道2连接至PID反馈值,P2264=755.1
- 将标定的输出r2272(通常不变)连接至转矩上限,P1522=2272
- 将误差信号r2273(通常为r2272乘以-1)连接至转矩下限,P1523=2273
- 转矩上限和下限值可以通过模拟量输入通道2连续调整
变频器现在可以运行于这些限幅值之内。也可以按照该方法设定别的限幅值,例如频率、电流限幅等。负载转矩监控该功能能够监控在一定频率范围内电机和系统负载间机械力的传送。典型的应用是皮带,可以监控皮带是否断开或者受力太大。 tipstricks_0019_load_torque_monitoring_V1_0__76.pdf (130,3 KB)
tipstricks_0019_load_torque_monitoring_V1_0__76.pdf (130,3 KB)
 Load_torque_monitoring.zip (26,1 KB)
Load_torque_monitoring.zip (26,1 KB)注意:
常问问题: "在转矩控制中使用点动功能" ID: 16818432
应用与工具: "MICROMASTER 4: 闭环转矩控制以及载荷分布" ID 23939668
也提供以下语言版本:- 德语
- 英语
文献属于产品树图文件夹(n):
- 驱动技术 变频器 低压变频器 常规SINAMICS G 变频器 SINAMICS G120 内置单元 Control Units
- 驱动技术 变频器 低压变频器 MICROMASTER 变频器 MICROMASTER 4 MICROMASTER 440
如何使用两个OLM建立冗余的光纤环网,LED将如何显示?
新手必读: 西门子工程师推荐本文档!-
文献
-
涉及产品
<说明:德国西门子模块订货号6ES7277-0AA22-0XA0
对于多OLM可参考手册:条目号8331164
对于多OLM可参考FAQ:条目号19758281建立带有两个PROFIBUS OLM的冗余光纤环网是冗余光纤环网的一种特殊情形,可以通过下列两个组态来实现。
组态 1:
图 1: 冗余光纤PROFIBUS环网OLM1/CH2 => LWL1 => OLM2/CH3, OLM2/CH2 => LWL2 => OLM1/CH3组态 2:
内存卡
17 6ES7 953-8LF20-0AA0 SIMATIC Micro内存卡 64kByte(MMC)
18 6ES7 953-8LG11-0AA0 SIMATIC Micro内存卡128KByte(MMC)
19 6ES7 953-8LJ20-0AA0 SIMATIC Micro内存卡512KByte(MMC)
20 6ES7 953-8LL20-0AA0 SIMATIC Micro内存卡2MByte(MMC)
21 6ES7 953-8LM20-0AA0 SIMATIC Micro内存卡4MByte(MMC)
22 6ES7 953-8LP20-0AA0 SIMATIC Micro内存卡8MByte(MMC)
开关量模板
23 6ES7 321-1BH02-0AA0 开入模块(16点,24VDC)
24 6ES7 321-1BH10-0AA0 开入模块(16点,24VDC)
25 6ES7 321-1BH50-0AA0 开入模块(16点,24VDC,源输入)
26 6ES7 321-1BL00-0AA0 开入模块(32点,24VDC)
27 6ES7 321-7BH01-0AB0 开入模块(16点,24VDC,诊断能力)
28 6ES7 321-1EL00-0AA0 开入模块(32点,120VAC)
29 6ES7 321-1FF01-0AA0 开入模块(8点,120/230VAC)
30 6ES7 321-1FF10-0AA0 开入模块(8点,120/230VAC)与公共电位单独连接
31 6ES7 321-1FH00-0AA0 开入模块(16点,120/230VAC)
32 6ES7 321-1CH00-0AA0 开入模块(16点,24/48VDC)
33 6ES7 321-1CH20-0AA0 开入模块(16点,48/125VDC)
34 6ES7 322-1BH01-0AA0 开出模块(16点,24VDC)
35 6ES7 322-1BH10-0AA0 开出模块(16点,24VDC)高速
36 6ES7 322-1CF00-0AA0 开出模块(8点,48-125VDC)
37 6ES7 322-8BF00-0AB0 开出模块(8点,24VDC)诊断能力
38 6ES7 322-5GH00-0AB0 开出模块(16点,24VDC,独立接点,故障保护)
39 6ES7 322-1BL00-0AA0 开出模块(32点,24VDC)
40 6ES7 322-1FL00-0AA0 开出模块(32点,120VAC/230VAC)
41 6ES7 322-1BF01-0AA0 开出模块(8点,24VDC,2A)
42 6ES7 322-1FF01-0AA0 开出模块(8点,120V/230VAC)
43 6ES7 322-5FF00-0AB0 开出模块(8点,120V/230VAC,独立接点)
44 6ES7 322-1HF01-0AA0 开出模块(8点,继电器,2A)
45 6ES7 322-1HF10-0AA0 开出模块(8点,继电器,5A,独立接点)
46 6ES7 322-1HH01-0AA0 开出模块(16点,继电器)
47 6ES7 322-5HF00-0AB0 开出模块(8点,继电器,5A,故障保护)
48 6ES7 322-1FH00-0AA0 开出模块(16点,120V/230VAC)
49 6ES7 323-1BH01-0AA0 8点输入,24VDC;8点输出,24VDC模块
50 6ES7 323-1BL00-0AA0 16点输入,24VDC;16点输出,24VDC模块上海朕锌电气设备有限公司电话:传真:联系人:
地址:主营产品:西门子系列
Copyright © 2025 版权所有: 产品网店铺主体:上海朕锌电气设备有限公司
免责声明:以上所展示的信息由企业自行提供,内容的真实性、准确性和合法性由发布企业负责。产品网对此不承担任何保证责任。
-
-